Modeling and Rendering of Holistic Haptic Texture
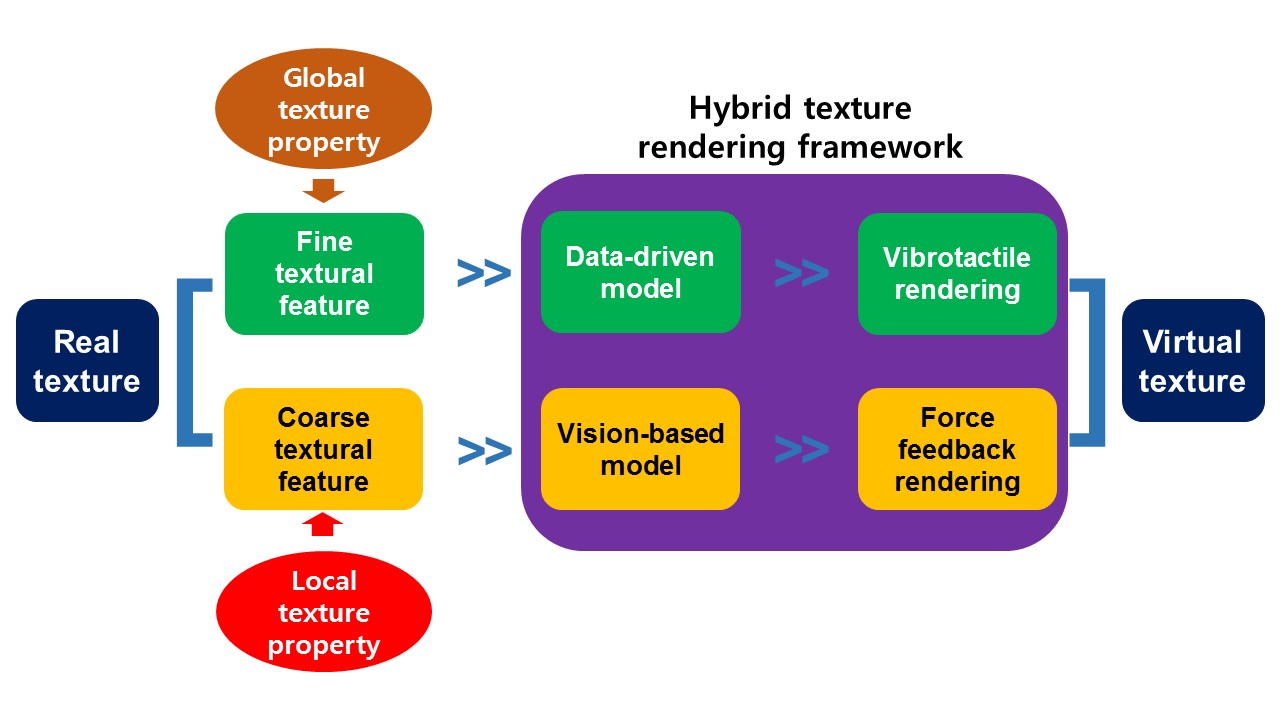
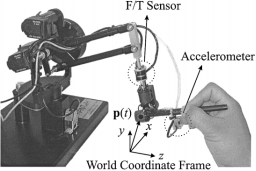
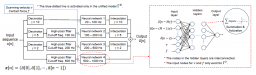
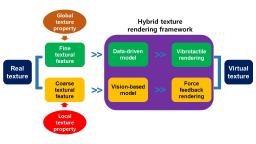
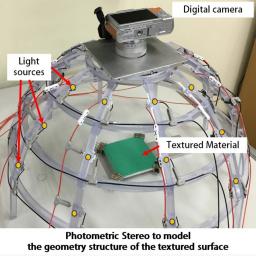
Haptic texture generally refers to a sensation caused by the fine structural irregularities of an object when we touch it. Since texture provides fundamental haptic information about the identity of the object, accurate modeling and rendering of surface texture are essential in many applications. Despite its importance, it still remains very challenging to model and render haptic texture in a realistic manner because haptic texture perception consists of multiple perceptual dimensions such as roughness-smoothness, warmness-coldness, hardness-softness, and stickiness-slipperiness. Hence, haptic texture modeling and rendering require many physical properties to be captured and rendered simultaneously. In this research, we develope a method to provide holistic texture sensation by providing both vibrotactile feedback and force feedback simultaneously. we augment a force-feedback device with a voice-coil actuator for hybrid rendering. Force-feedback signal generated based on a geometry model of real texture deliver the sensation of coarse textural features, and vibrotactile signal synthesized by a contact acceleration model represents the sensation of fine textural features.