VR-based Haptic Driving Training
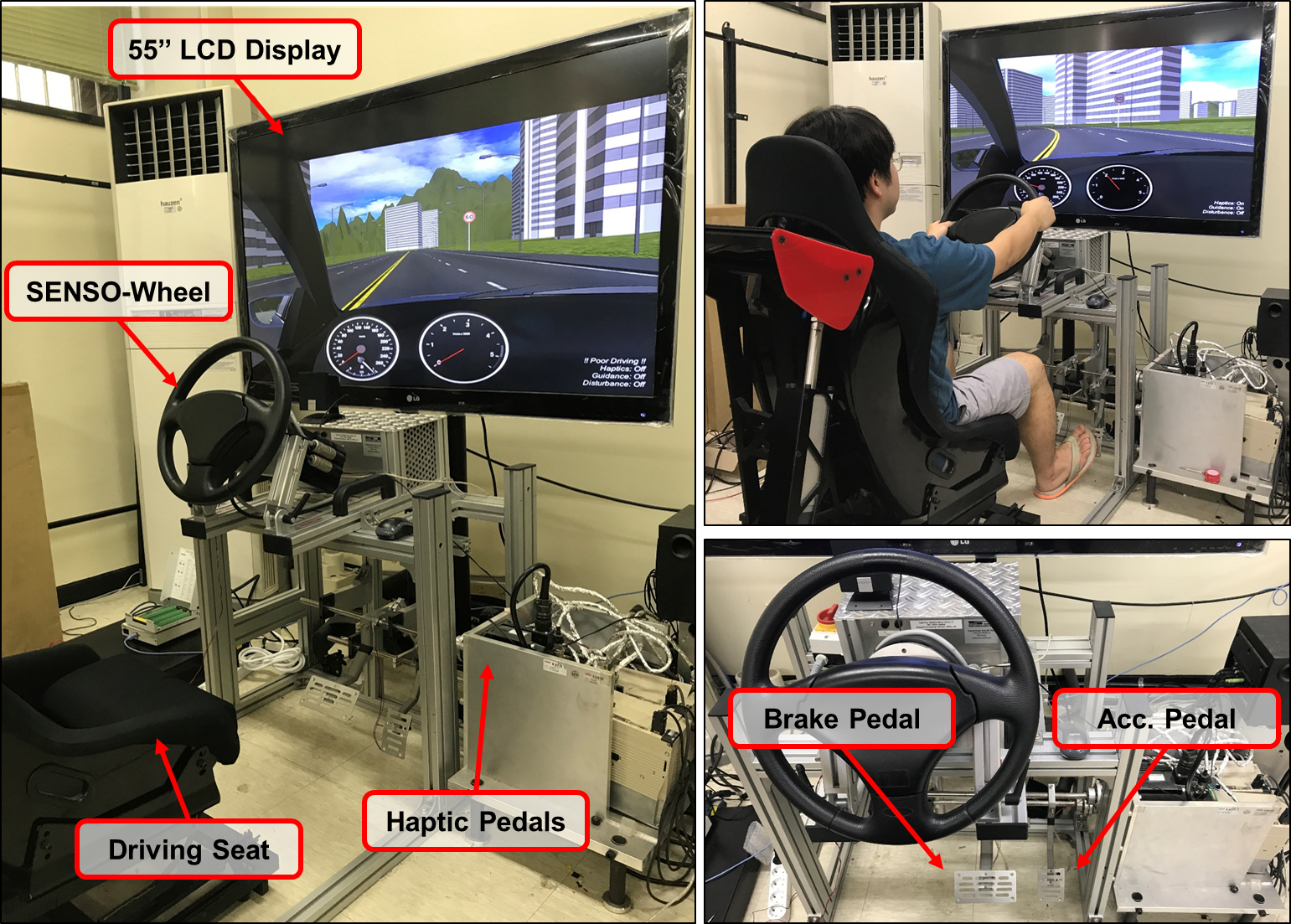
Recent motor learning researches aim at establishing methodology for modeling human sensorimotor skills and transferring the modeled skills to the trainee using haptic interfaces. Standing on a research continuum, we developed a unique haptic VR driving training simulator providing error-corrective haptic feedback for learning a driving skill, which is a routine sensorimotor task but still difficult for novice drivers to learn without any frustration. Therefore, we utilize a modeling method which assimilates a expert driver's skill and use the model to implement successful haptic transfer algorithms (such as haptic guidance, error augmentation, haptic disturbance, and so on). Using the driving simulator, we collect the driving data in VR, and model a driving task from such data. Further, we investigate an efficiency of driving skill learning algorithms under human driver experiments, using the simulator. This work had been supported by National Research Foundation of Korea under the National Research Laboratory (NRL) Program.