Haptic Rendering of Surface Geometry and Texture on Electrovibration Display
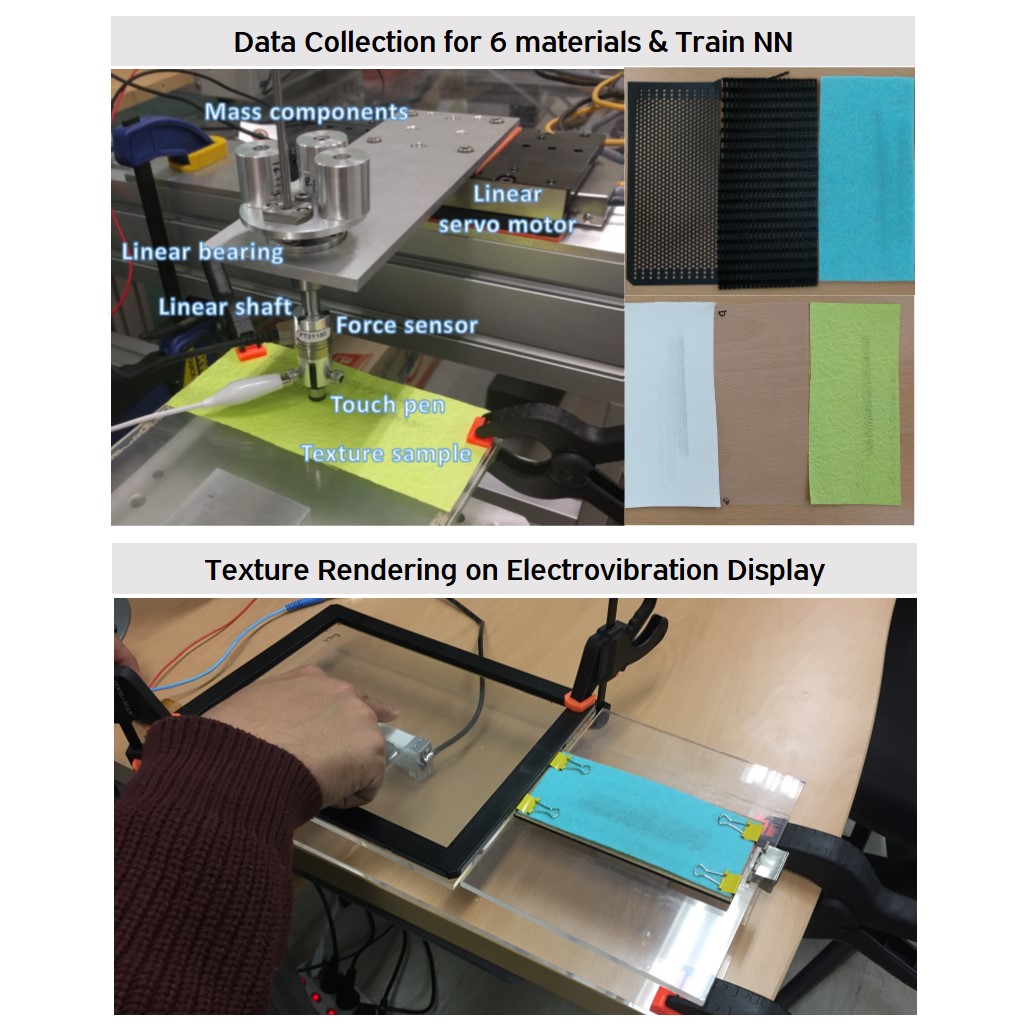
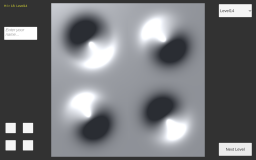
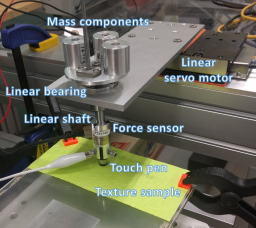
While technology advances improve the quality of touchscreen devices such as mobile phones and tablets, but their functionality is still limited to simple user interactions. At best, they can generate some simple monotonic vibrations in response to user actions. A natural interaction with such touchscreen devices requires better and more intuitive haptic feedback, tailored based on the application. Various friction displays enable a new tactile feedback on touchscreens, and electrovibration display is one of them. Electrovibration display increases the surfaced friction in response to user’s touch. In this research, we particularly focused on rendering surface 3D curvature and fine texture on electrovibration display. We introduced a gradient-based method to render 3D objects. It includes a generalized real-time algorithm to estimate surface gradient from the surface of any 3D mesh. In addition, a separate edge detection method is included to emphasis sharp edges while scanning the surface of a mesh. Also, we proposed a neural network based data-driven texture modeling and rendering method. We first created an inverse neural network dynamic model for the electrovibration display to estimate an actuation signal from the forces collected from the surface of real texture samples. We trained neural networks to learn from the forces resulted from applying a full-band PRBS to the electrovibration display and generate similar actuation signals. While the networks are trained under known normal pressure and scanning velocity, for untested conditions, we proposed a two-part interpolation scheme to produce actuation signal from the neighborhood conditions.