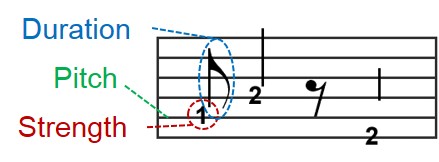
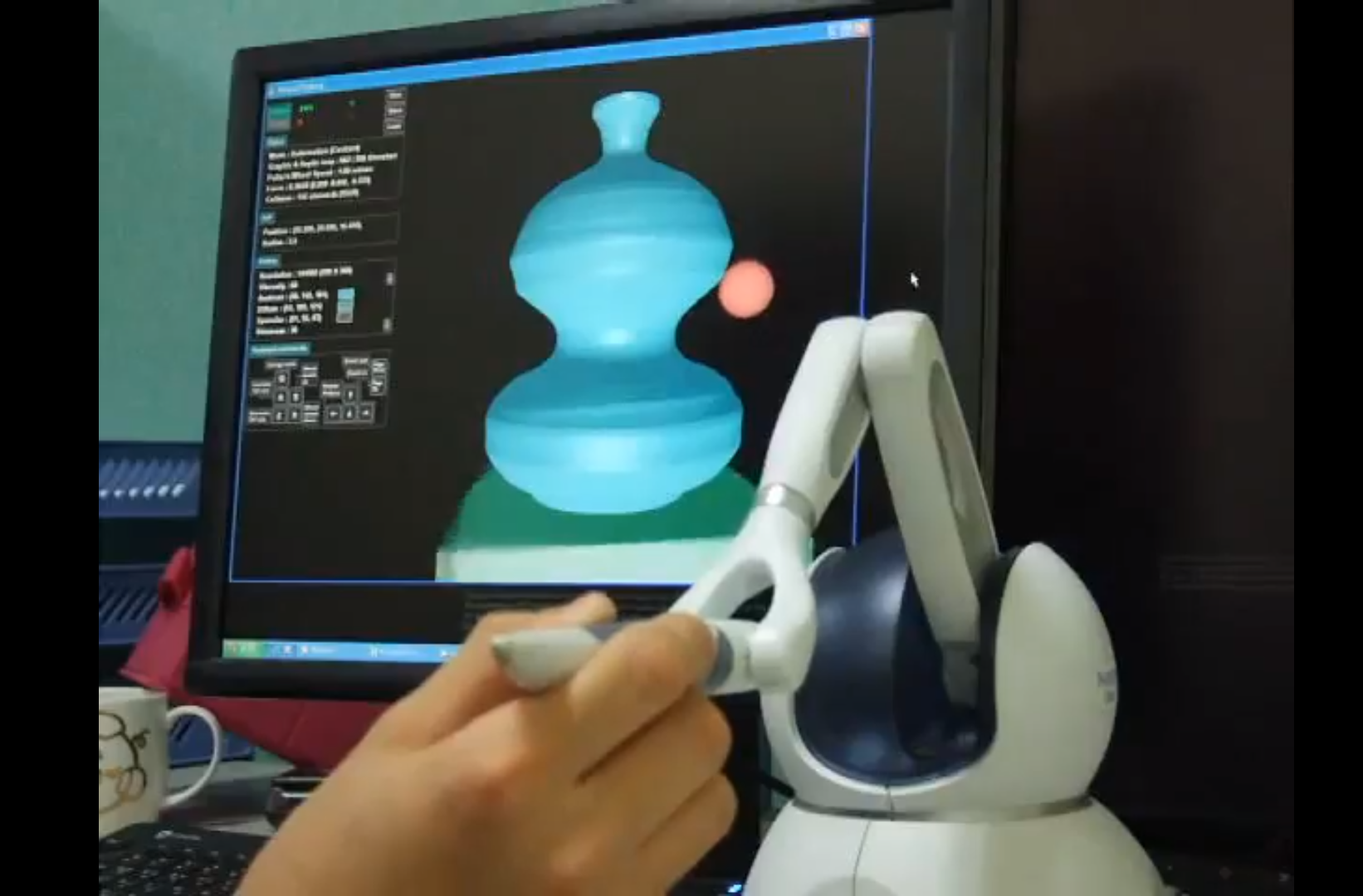
Musical experiences and haptic (tactile) experiences shares many characteristics, such as rhythm, pitch, and dynamics (change of amplitudes). Our research of haptic music focused on: 1) haptic rendering of music and 2) haptic interfaces for musical instrument learning. To render music haptically, we extracted musical features such as rhythms, beats, and salient melody and convert it to haptic stimulus to rich expressions to users. We also suggested and evaluated the effectiveness of a haptic guidance method for string instrument learning.